BabyCat
(2007-2008)
|
|
|


Voici un petit jet a turbine électrique, il sera catapulte a partir
d’une rampe. L’envergure est de 32po. Un enregistreur de vol (FDR) me permettra
d’enregistrer plein de paramètres tel: altitude, air speed, température,
voltage, rpm etc.
Avion: BabyCat http://www.electricjetfactory.com/
Moteur: Fagaeo brushless
ESC: Hyperion Titan 50A
Accu: 2500mAh 3S Hyperion Lifestorm
Caméra vidéo:
KX-131
Transmetteur
vidéo: 500mW, 2.4 Ghz: http://www.aeropix.ch/
Altimètre: Zlog http://www.hexpertsystems.com/zlog/index.html
Flight Data Recorder(FDR): http://www.eagletreesystems.com/Plane/plane.html
Novembre 2006
|
|
Il était évident que la camera était installée trop basse
avec la verrière originale, je ne pouvais pas voir adéquatement a
l’extérieur, j’ai du la remplacer par une autre que j’ai fabrique. |
|


|
J’ai modifie l’altimètre ZLOG en retirant l’affichage LCD
du circuit électronique et en ajoutant de long fils permettant de
positionner l’affichage LCD sur le nez de l’avion et de connaitre l’altitude
en tout temps, ou presque parce que en fait il est difficile a lire, il faut
que le soleil l’éclaire convenablement. |
|
|
|
|
Un
voltmètre à 10 led est positionné sur le tableau de bord. |
|
|
J`ai ajoute deux ouverture sur le nez de l`avion. Elles vont s`ouvrir
en vol pour laisser entrer l`air afin de refroidir l`accumulateur. |
|
|



|
|
Des trous ont êtes perces a différents endroit pour bien aérer l`intérieur.
Deux grilles sont places dessous l`avion. |
|


|
|
Le transmetteur 500mW, 2.4 gHz de Aeropix est positionne
dans le cockpit derrière la camera KX131 |

|
Un enregistreur de vol (FDR) ou boite noire permet d`enregistrer plein
de paramètres et de les consulter après le vol sur un ordinateur. Ainsi il
devient possible de connaitre l`altitude, vitesse (air speed), voltage,
courant, température, position servos durant tout le vol a toutes les
secondes. C`est semblable aux boites noires sur les vrais avions. |
|

|
|
Une sonde de température est installe sur le moteur. Une seconde
sonde est place sous l`accumulateur.
Le tube pitot pour la vitesse est installe sur le bord d`attaque de l`aile.
Celui-ci est relie a un capteur de pression dans l`enregistreur de vol. |
|


|
|
Le récepteur radio (Berg 7p)
est visible sur cette photo. Il est le principal suspect pour les problèmes
que j`ai éprouvés lors des premiers essaies. |
|
|
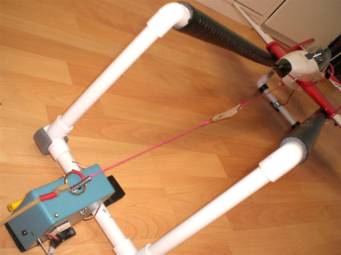
Je vais utiliser une catapulte pour lancer l’avion. C’est
un design que j’ai vu sur internet, je m’en suis inspirer mais j’ai remplacé
le système de pédale pour le lancement par un servo moteur |
|
|

|
|
Dans l’avion une extension se branche dans un
canal libre. Je n’ai qu’à basculer un interrupteur sur ma radio et un signal
active le servo de la rampe qui relâche l’avion et se débranche en même temps.
Une extension part du servo et se branche dans le derrière de l’avion. Lorsque le servo relache l`anneau,
une bande elastique projete l`avion vers le ciel, un deuxieme anneau attache
dessous le ventree de làvion a un crochet se relache et l`avion devient
libre. |
|
|
Le premier lancement a été une catastrophe, j’ai utilise
la rampe et l’avion est partis en vrille et s’est écrasé brisant l’aile et
une partie du fuselage. L’avion a été réparé durant l’été mais j’ai décidé
de le garder de cote et d’attendre l’année suivante pour le faire voler. |
||
|
L’année suivante un ami à lancer l’avion a la main et
celui-ci a réussi à prendre un peu d’altitude, mais pour finalement mieux
s’écraser… l’avion a été détruit
. Je ne suis pas sur quel était son problème mais je suspecte le recepteur
Berg7P avec lequel j`ai eprouve differents problemes. Il ne faut pas que je
l`utilise avec des transmetteurs videos 2.4Ghz. Après avoir tant travaillé sur cet avion, il n’aura pas
volé 1 minute en tout J J’ai récupérer tout l’électronique et j’ai
jeté l’avion, je ne veux plus le voir! |
||


